If you check out our DIY section, you will find several guides for creating your own presence sensor with an ESP32 board. For tinkerers and DIY enthusiasts, this is an easy way to build your own device with open-source firmware and cheap components.
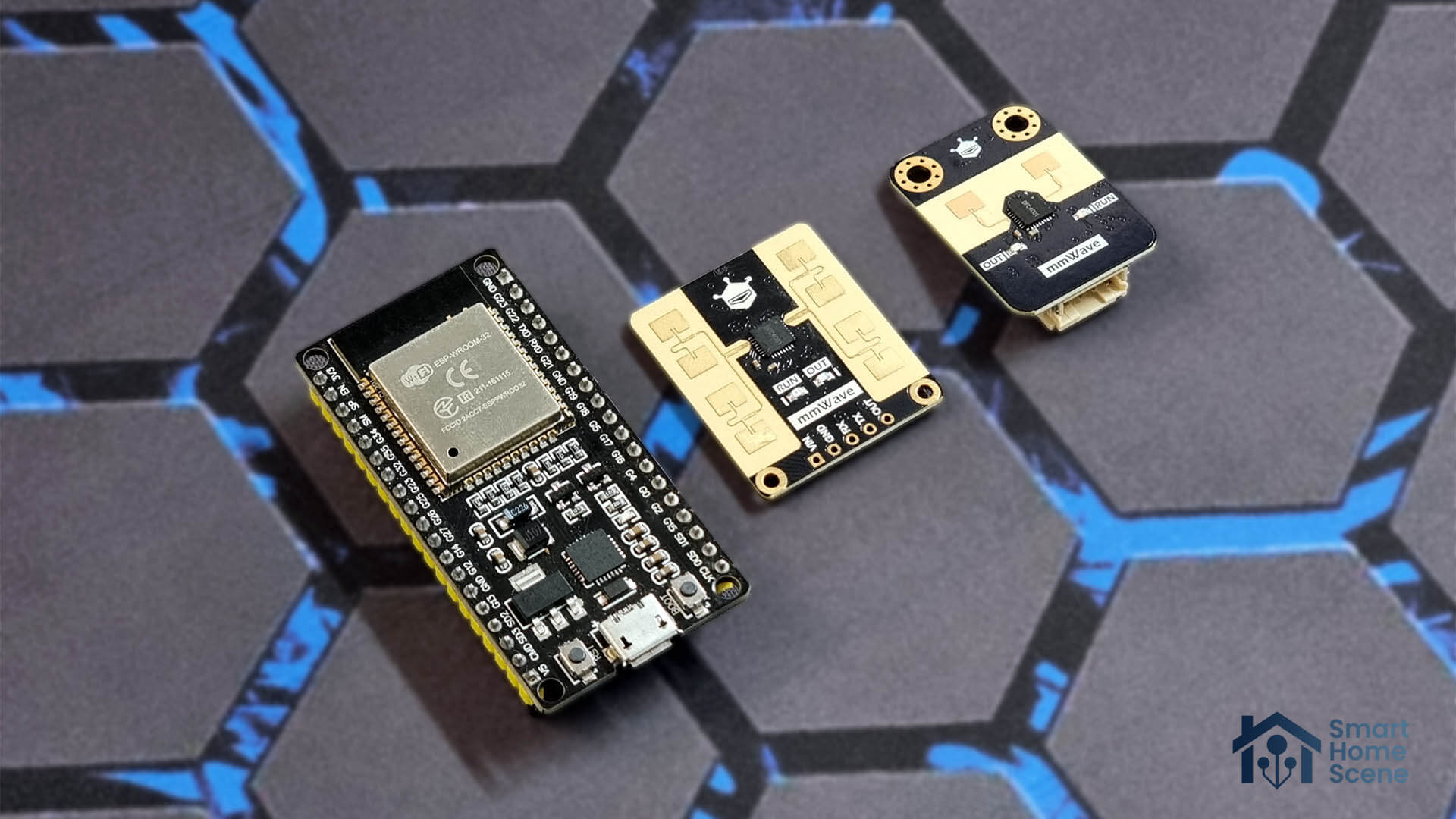
In this article, I’m sharing a guide for building a presence sensor with a 25 meters detection range! It’s based on the DFRobot C4001 (SEN0609) mmWave radar sensor and an ESP32 board, all coded through ESPHome and Home Assistant.
About the DFRobot C4001
The DFRobot C4001 is a newly-released mmWave doppler radar sensor designed specifically for detecting human presence. It’s available as 12m and a whopping 25m meter variant, with minimal difference in cost (1$). In this guide, I’m using the 25m version (SEN0609), but the code can be easily adapted for the 12m (SEN0610) version as well.
Here are the differences between these two models:
 CM4001 (SEN0609, 25m) |  CM4001 (SEN0610, 12m) | |
|---|---|---|
| Static Detection Range | up to 16m | up to 8m |
| Motion Detection Range | up to 25m | up to 12m |
| Detection Beam Angle | 100×40° | 100×80° |
| Velocity Detection | 0.1 to 10 m/s | 0.1 to 10 m/s |
| Operating Voltage | 3.3/5V | 3.3/5V |
| Operating Frequency | 24GHz | 24GHz |
| Operating Temperature | -40~85℃ | -40~85℃ |
| Size | 26x30mm | 22x30mm |
| Applications | Human Detection Distance and Velocity Detection Environmental Monitoring Industrial Automation Real-time Monitoring and Tracking | Human Detection Distance and Velocity Detection Environmental Monitoring Industrial Automation Real-time Monitoring and Tracking |
| Price | $13.90 @ DFRobot | $12.90 @ DFRobot |
Requirements
In order to build this awesome 25m occupancy sensor, you are going to need a couple of things. I highly suggest going for the 25 meter variant as its easier to work with (2.54mm pin headers) and the minimal price difference doesn’t justify the range decrease. Here’s the shopping list:
🛒 25-meter version
Note: The DFRobot (25m) sensor comes with the header pins unsoldered, so you will need to solder them yourself. You cannot simply attach 2.54 jumper wires and connect the SEN0609 sensor and ESP32 board. The SEN0610 version uses a single 4-pin JST connector instead (included), so soldering may not be required if you get a pre-soldered ESP32 board.
Wiring the DFRobot and ESP32 Board
Once you have everything ready, you can continue to assemble this 25m mmWave occupancy sensor. I’ve recycled a generic ESP-WROOM-32 board from another project, but you can use any model you have at hand. Note the wiring diagram for the DFRobot and ESP32:
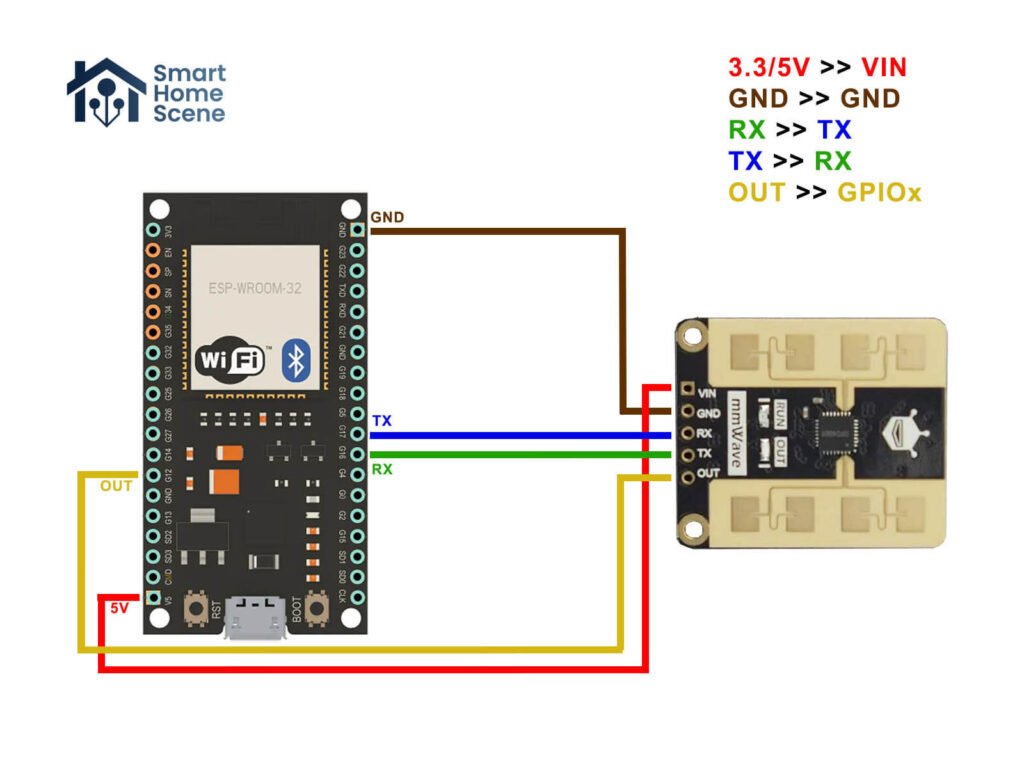
From the wiring diagram I created, you will notice the output terminal (OUT) is also connected to a GPIO pin (GPIO12) on the ESP board. This is because it is possible to use this sensor with only a single GPIO pin. However, if you wish to change settings and configure the sensor, a UART Bus component (and its GPIO pin connection) is required in the device’s configuration.
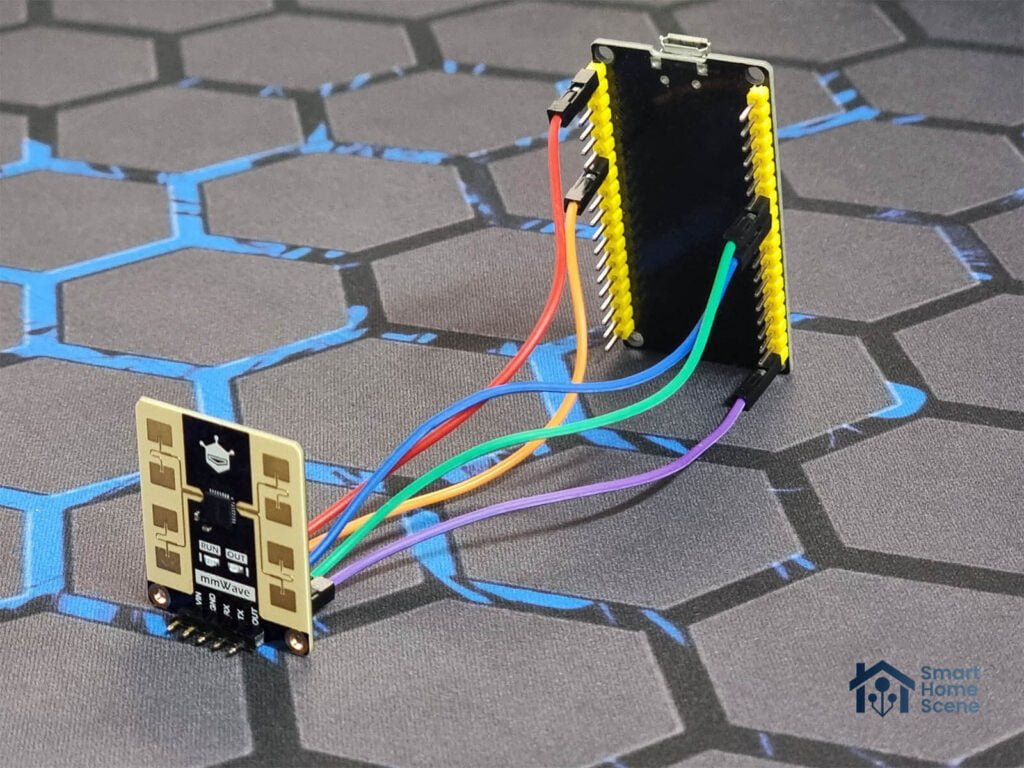
To make the code leaner, the binary occupancy status is updated through the output terminal instead of UART. You can enable the UART presence output entity if you wish to get UART data too. Here’s how my testing device looked once I wired it up:
Flashing and Adding the Sensor to Home Assistant
The ESPHome code for the DFRobot SEN0609 radar sensor was originally created for the EPLite by Lewis from EverythingSmartHome. The DFRobot SEN0609 is compatible with both the EPLite and the second revision of the EPOne. If you are using one of the ESH devices, you can upgrade by simply swapping the sensor and re-flashing the board. Props to Lewis for developing the code and sharing it with the community!
It’s worth noting that a batch of the DFRobot SEN0609 has a set of indicator LEDs mounted on the front, which cannot be turned off. It’s nothing a little black tape can’t fix, but for the time being, I’ve removed the code for the LEDs. I’ve adapted the rest, eliminated some unnecessary things and tweaked it a bit to offer a better integration with generic ESP32 boards.
Here’s the full code, adapt it to your config:
DRRobot C4001 (SEN0609) ESPHome code
esphome:
name: dfrobot-25m
friendly_name: DFRobot 25M
esp32:
board: esp32dev
framework:
type: esp-idf
# Enable logging
logger:
# Enable Home Assistant API
api:
encryption:
key: "xxxxx"
ota:
password: "xxxxx"
wifi:
ssid: !secret wifi_ssid
password: !secret wifi_password
# Enable fallback hotspot (captive portal) in case wifi connection fails
ap:
ssid: "Dfrobot-25M Fallback Hotspot"
password: "xxxxx"
i2c:
sda: 21
scl: 22
scan: true
uart:
id: uart_bus
tx_pin: GPIO16 #Change to your TX pin
rx_pin: GPIO17 #Change to your RX pin
baud_rate: 9600
binary_sensor:
- platform: gpio
name: Occupancy
id: mmwave
device_class: occupancy
pin:
number: GPIO12 #Change to your GPIO pin
mode: INPUT_PULLDOWN
switch:
- platform: template
name: mmWave sensor
id: mmwave_sensor
disabled_by_default: True
entity_category: config
optimistic: true
restore_mode: RESTORE_DEFAULT_ON
turn_on_action:
- uart.write: "sensorStart"
- delay: 1s
turn_off_action:
- uart.write: "sensorStop"
- delay: 1s
- platform: template
name: UART presence output
id: uart_presence_output
entity_category: config
disabled_by_default: true
optimistic: true
turn_on_action:
- switch.turn_off: mmwave_sensor
- delay: 1s
- uart.write: "setUartOutput 1 1"
- delay: 1s
- uart.write: "saveConfig"
- delay: 3s
- switch.turn_on: mmwave_sensor
turn_off_action:
- switch.turn_off: mmwave_sensor
- delay: 1s
- uart.write: "setUartOutput 1 0"
- delay: 1s
- uart.write: "saveConfig"
- delay: 3s
- switch.turn_on: mmwave_sensor
- platform: template
name: UART target output
id: uart_target_output
entity_category: config
disabled_by_default: true
optimistic: true
assumed_state: false
turn_on_action:
- switch.turn_off: mmwave_sensor
- delay: 1s
- uart.write: "setUartOutput 2 1 1 1"
- delay: 1s
- uart.write: "saveConfig"
- delay: 3s
- switch.turn_on: mmwave_sensor
turn_off_action:
- switch.turn_off: mmwave_sensor
- delay: 1s
- uart.write: "setUartOutput 2 0"
- delay: 1s
- uart.write: "saveConfig"
- delay: 3s
- switch.turn_on: mmwave_sensor
number:
- platform: template
id: range_minimum
name: Range (Minimum)
icon: mdi:arrow-collapse-left
entity_category: config
min_value: 0
max_value: 25
initial_value: 0
optimistic: true
step: 0.1
restore_value: true
unit_of_measurement: m
mode: slider
- platform: template
id: range_maximum
name: Range (Maximum)
icon: mdi:arrow-collapse-right
entity_category: config
min_value: 0
max_value: 25
initial_value: 12
optimistic: true
step: 0.1
restore_value: true
unit_of_measurement: m
mode: slider
- platform: template
id: range_reduced_mmwave
name: Range Reduced (mmWave)
icon: mdi:arrow-collapse-horizontal
entity_category: config
min_value: 0
max_value: 25
initial_value: 0.8
optimistic: true
step: 0.1
restore_value: true
unit_of_measurement: m
mode: slider
set_action:
- switch.turn_off: mmwave_sensor
- delay: 1s
- uart.write: !lambda
std::string ms = "setRangeReduced " + to_string(x);
return std::vector<unsigned char>(ms.begin(), ms.end());
- delay: 1s
- uart.write: "saveConfig"
- delay: 1s
- switch.turn_on: mmwave_sensor
#Occupancy clear delay
- platform: template
name: Clearance Delay (Occupancy)
icon: mdi:clock-end
entity_category: config
id: mmwave_off_latency
min_value: 1
max_value: 600
initial_value: 15
optimistic: true
step: 5
restore_value: true
unit_of_measurement: seconds
mode: slider
set_action:
- switch.turn_off: mmwave_sensor
- delay: 1s
- uart.write: !lambda |-
std::string mss = "setLatency " + to_string(id(mmwave_on_latency).state) + " " + to_string(id(mmwave_off_latency).state);
return std::vector<unsigned char>(mss.begin(), mss.end());
- delay: 1s
- uart.write: "saveConfig"
- delay: 1s
- switch.turn_on: mmwave_sensor
#Occupancy detection delay
- platform: template
name: Detection Delay (Movement)
icon: mdi:clock-start
id: mmwave_on_latency
entity_category: config
min_value: 0
max_value: 2
initial_value: 0
optimistic: true
step: 0.25
restore_value: true
unit_of_measurement: seconds
mode: slider
set_action:
- switch.turn_off: mmwave_sensor
- delay: 1s
- uart.write: !lambda |-
std::string mss = "setLatency " + to_string(id(mmwave_on_latency).state) + " " + to_string(id(mmwave_off_latency).state);
return std::vector<unsigned char>(mss.begin(), mss.end());
- delay: 1s
- uart.write: "saveConfig"
- delay: 1s
- switch.turn_on: mmwave_sensor
#Static presence detection sensitivity
- platform: template
name: Sensitivity (Occupancy)
icon: mdi:target-variant
id: sensitivity_occupancy
entity_category: config
min_value: 0
max_value: 9
initial_value: 7
optimistic: true
step: 1
restore_value: true
#Initial movement trigger sensitivity
- platform: template
name: Sensitivity (Movement)
icon: mdi:target-variant
id: sensitivity_movement
entity_category: config
min_value: 0
max_value: 9
initial_value: 5
optimistic: true
step: 1
restore_value: true
button:
- platform: template
name: "Set Distance"
id: set_distance
entity_category: config
on_press:
- switch.turn_off: mmwave_sensor
- delay: 1s
- uart.write: !lambda
std::string ms = "setRange " + to_string(id(range_minimum).state) + " " + to_string(id(range_maximum).state);
return std::vector<unsigned char>(ms.begin(), ms.end());
- delay: 1s
- uart.write: "saveConfig"
- delay: 1s
- switch.turn_on: mmwave_sensor
- platform: template
name: "Set Sensitivity"
id: set_sensitivity
entity_category: config
on_press:
- switch.turn_off: mmwave_sensor
- delay: 1s
- uart.write:
!lambda std::string mss = "setSensitivity " + to_string(id(sensitivity_occupancy).state) + " " + to_string(id(sensitivity_movement).state);
return std::vector<unsigned char>(mss.begin(), mss.end());
- delay: 1s
- uart.write: "saveConfig"
- delay: 1s
- switch.turn_on: mmwave_sensor
- platform: template
name: Restart mmWave Sensor
id: restart_mmwave
entity_category: config
internal: true
on_press:
- uart.write: "resetSystem"
- platform: template
name: Factory Reset mmWave
icon: mdi:cog-counterclockwise
id: factory_reset_mmwave
disabled_by_default: true
entity_category: config
on_press:
- switch.turn_off: mmwave_sensor
- delay: 1s
- uart.write: "resetCfg"
- delay: 3s
- switch.turn_on: mmwave_sensorOnce flashed and connected to your Wi-Fi network, your new DIY sensor should get auto discovered in Home Assistant. If not, add it manually by navigating to Settings > Devices & Services > + Add Integration > ESPHome and pasting the IP address of the ESP board. Here’s what the sensor adds to Home Assistant once added:
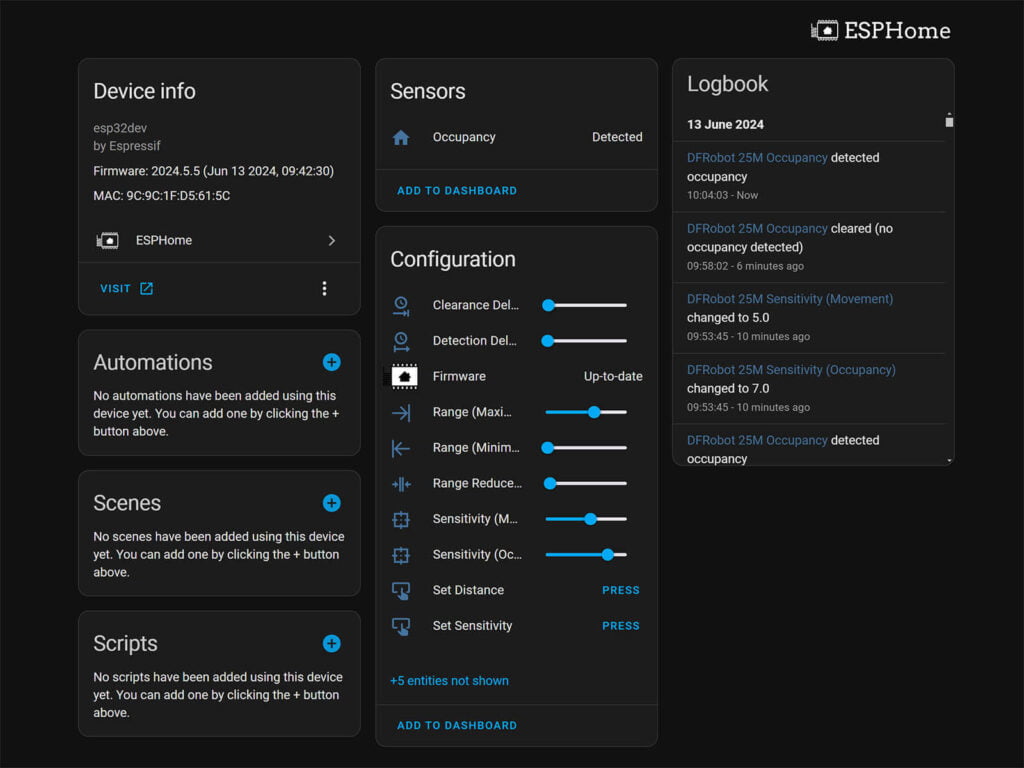
I’ve also renamed some of the entities added to Home Assistant, to make it more understandable and user-friendly. You can change their names in the ESPHome config above. I have some ideas for further improving the firmware for the DFRobot sensor (like separate motion and occupancy entities), so it will remain deployed in the office until then. If you have to offer a better version of the code, please share it in the comments bellow.
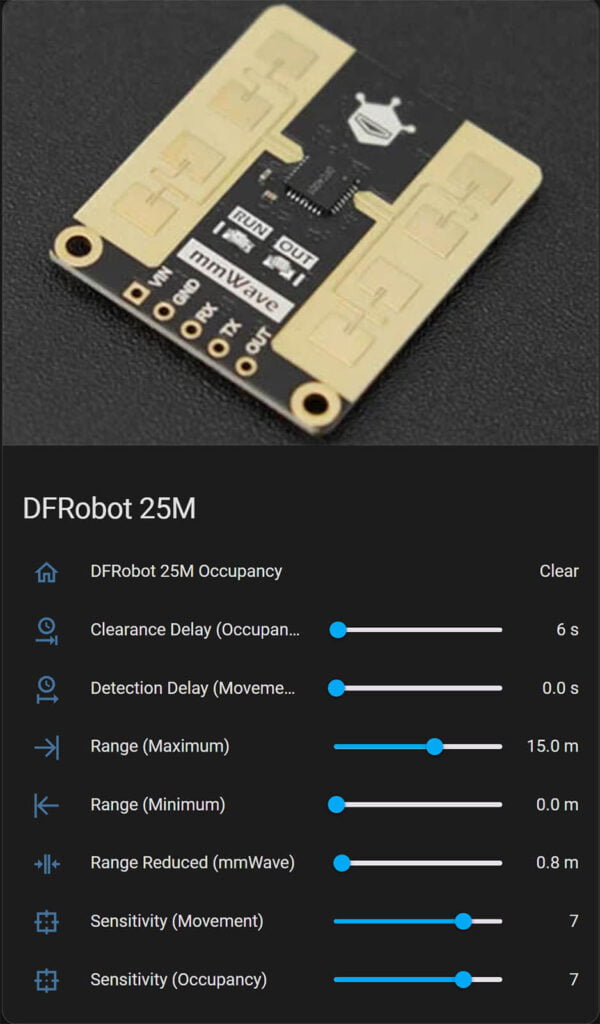
Configuring and Testing Performance
Okay, now for the fun part. The DFRobot SEN0609’s entities are very easy to understand and configure. You can set the minimum and maximum detection range, set the sensitivity separately for the initial trigger and static occupancy detection and add clearance/detection delays.
It’s important to understand that the huge 25 meter range of the DFRobot only applies to movement beyond 16 meters. In other words, the sensor is capable in detecting static presence from 0-16 meters and detect only movement from 16-25 meters.
Because of its huge detection range, it was a real challenge to find a space indoors that is so large. I managed to install it inside a furniture production plant (when no one was looking) and benchmark it’s performance.
TLDR, it is incredible.
Test 1: Mounted in office (6 meters)
I installed the sensor in a corner in my office and set the maximum range to 10 meters. I left the movement sensitivity at its default value of 5 and the occupancy at 7. Detection delay was set to 0 and presence keep time to 30 seconds.
After a full day of triggering the sensor and monitoring my static presence in front of the PC, I can comfortably state that this is one of the best mmWave radar sensor available. No false negative triggers at this distance, no unexpected delays, no performance issues of any kind. The fan-triggered false positives are still there though, so watch out for that PC fan spinning in the sensors’ field of view.
Test 2: Mounted in production plant (20 meters)
For this one, I set the detection range to the maximum of 25 meters. I bumped motion and occupancy sensitivity to 9 and left the detection/occupancy delays the same. I attached the device in a corner of this production plant and started moving around.
Comin in from the front at about 20 meters, and the occupancy sensor gets triggered! Standing still at this distance and the presence clears, which I expected per the sensor specs.
I wanted to see how sensitive it truly was to motion, so I lowered the occupancy clear time to 5 seconds and stood still without moving. As soon as I budged forward, the sensor changed state to occupied immediately! When I stopped in place, it cleared presence within a few seconds. I was so impressed!
Moving into it’s occupancy range of 15 meters and standing still, gave me a few false negative triggers initially. I realized this is because 5 seconds is very short period of time for the wave to travel back and forth reliably and update the sensor. Increasing the time out to 30 seconds eliminated most false negative triggers. Moving further towards the device, eliminated 99% of them. Ultimately, I would say that this sensor detects static presence reliably within 10-12 meters.
Final thoughts
After a few days of tinkering with the DFRobot 25-meter mmWave radar sensor, I’ve gotten a good sense of it’s capability and performance level. This occupancy sensor is absolutely excellent and I would even say it raises the bar for mmWave radar sensors used in the smart home.
The static presence detection set at 16 meters is a huge number and I don’t think most people have indoor living spaces that long or wide. If you manage to find a good use case for the 25 meter motion detection range, than you need to look no further than the DFRobot SEN0609 radar sensor.
With that being said, do you really need a detection range of 25 meters for indoor presence monitoring? Debatable. For example, the HLK-2410b/c is more than capable of reliably detecting human presence in normal-sized rooms. It’s maximum range is set at 9 meters and it can operate reliably up to 7 meters from my tests. Check out the relevant DIY guide and decide for yourself.
The next important thing to consider is price. The DFRobot SEN0609 (25m) goes for $13.90 currently, while the DFRobot SEN0610 (12m) costs $12.90. Hi-Link sensors are only $3-$5 each. It’s not a huge difference if taken at face value, but you could deploy 2 or 3 Hi-Link presence sensors for the price of one DFRobot.
With all things considered, the DFRobot C4001 sensors are an excellent choice if price is not an issue for you. Here are some links to their official store as well as Amazon.
SIDE NOTE: If you are looking for a ready-made, reliable and tested presence sensor, consider the new Apollo MSR-2 multi-sensor. Just like the first gen MSR-1, it uses the HLK-LD2410b and is very reliable, tweakable, and works with Home Assistant out of the box. You can read the full review here.









